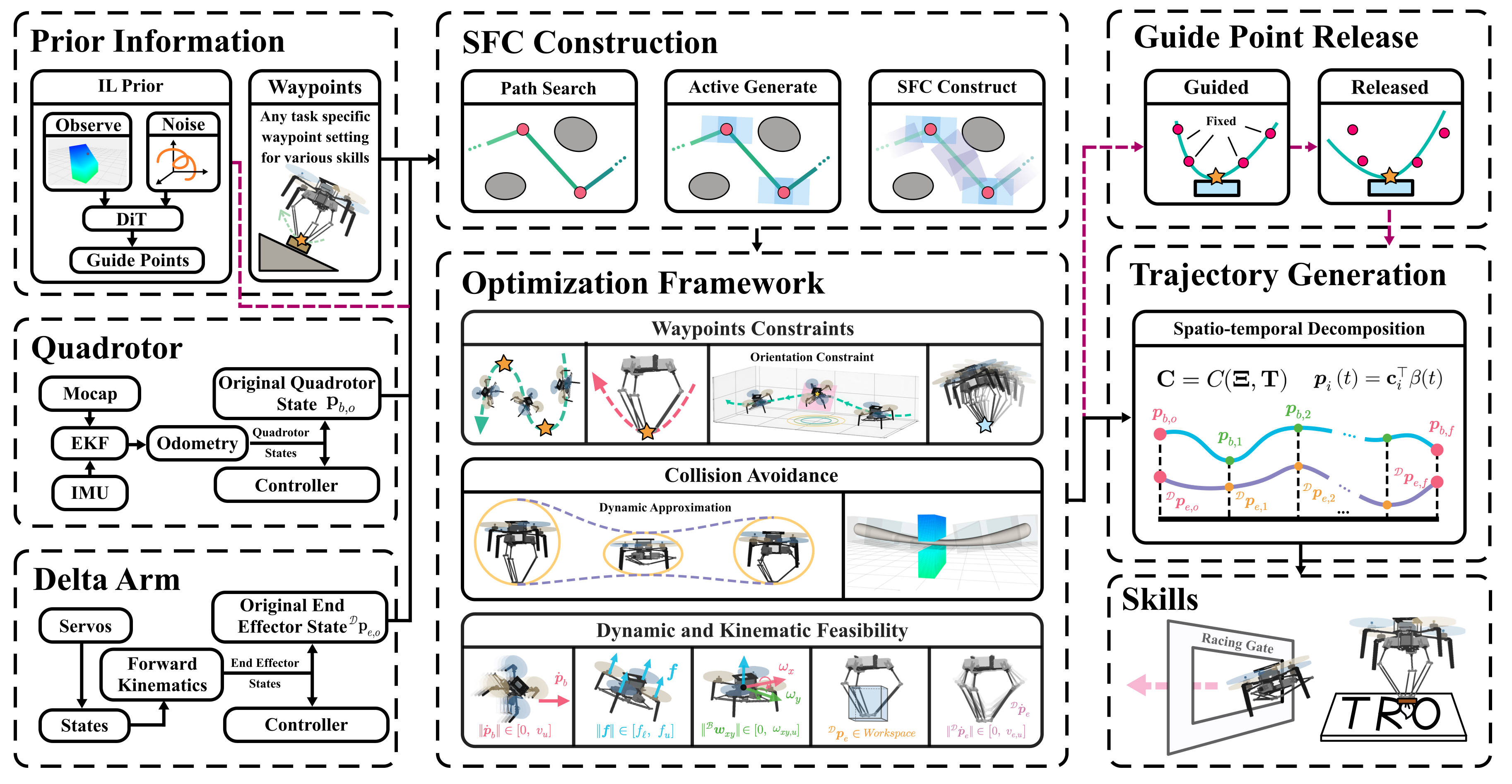
Expressive motion planning for Aerial Manipulators (AMs) is essential for tackling complex manipulation tasks, yet achieving coupled trajectory planning adaptive to various tasks remains challenging, especially for those requiring aggressive maneuvers. In this work, we propose a novel whole-body integrated motion planning framework for quadrotor-based AMs that leverages flexible waypoint constraints to achieve versatile manipulation capabilities. These waypoint constraints enable the specification of individual position requirements for either the quadrotor or end-effector, while also accommodating higher-order velocity and orientation constraints for complex manipulation tasks. To implement our framework, we exploit spatio-temporal trajectory characteristics and formulate an optimization problem to generate feasible trajectories for both the quadrotor and manipulator while ensuring collision avoidance considering varying robot configurations, dynamic feasibility, and kinematic feasibility. Furthermore, to enhance the maneuverability for specific tasks, we employ Imitation Learning (IL) to facilitate the optimization process to avoid poor local optima. The effectiveness of our framework is validated through comprehensive simulations and real-world experiments, where we successfully demonstrate nine fundamental manipulation skills across various environments.
Strike Task
Cross Task
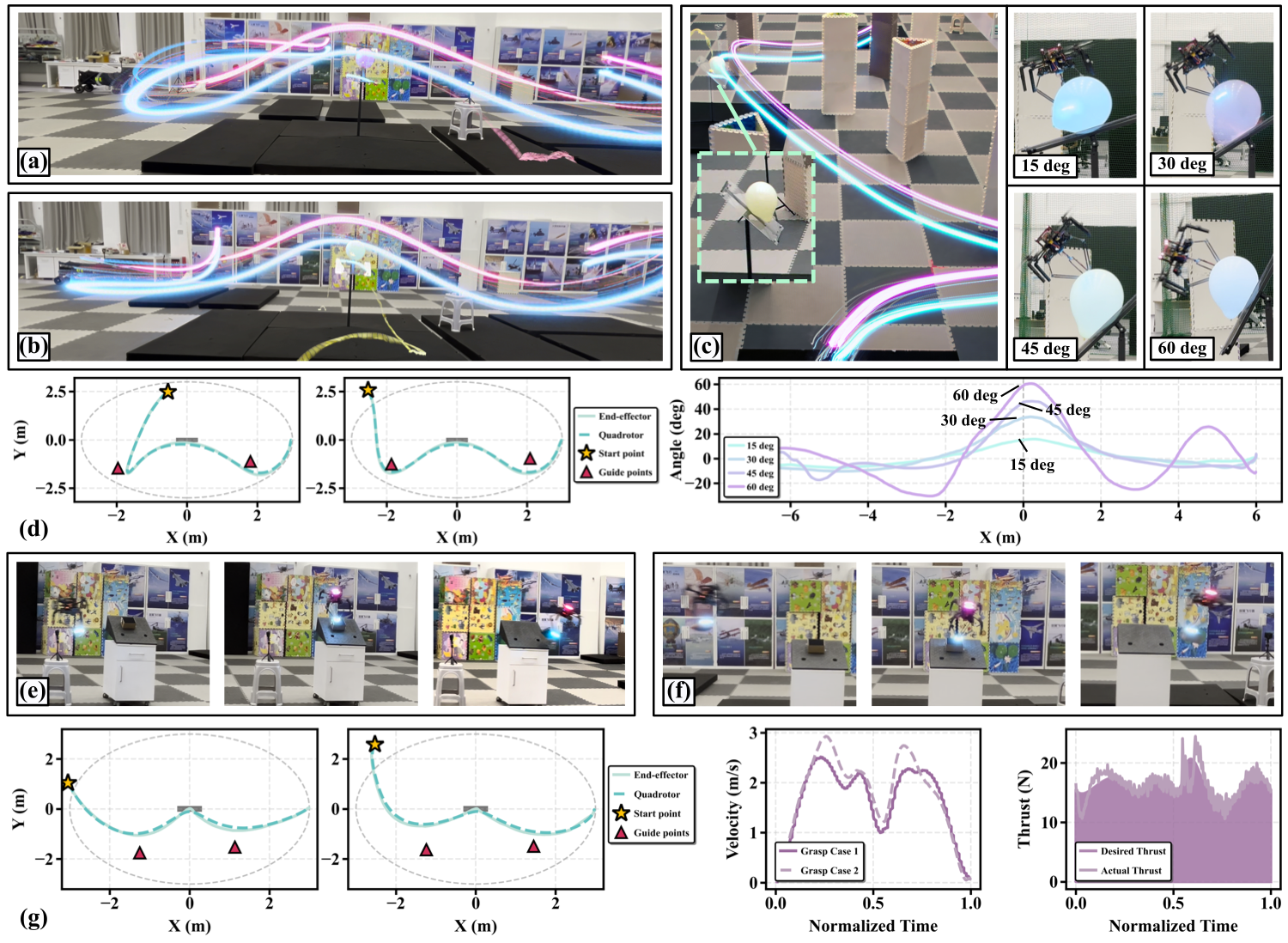
Grasp Task
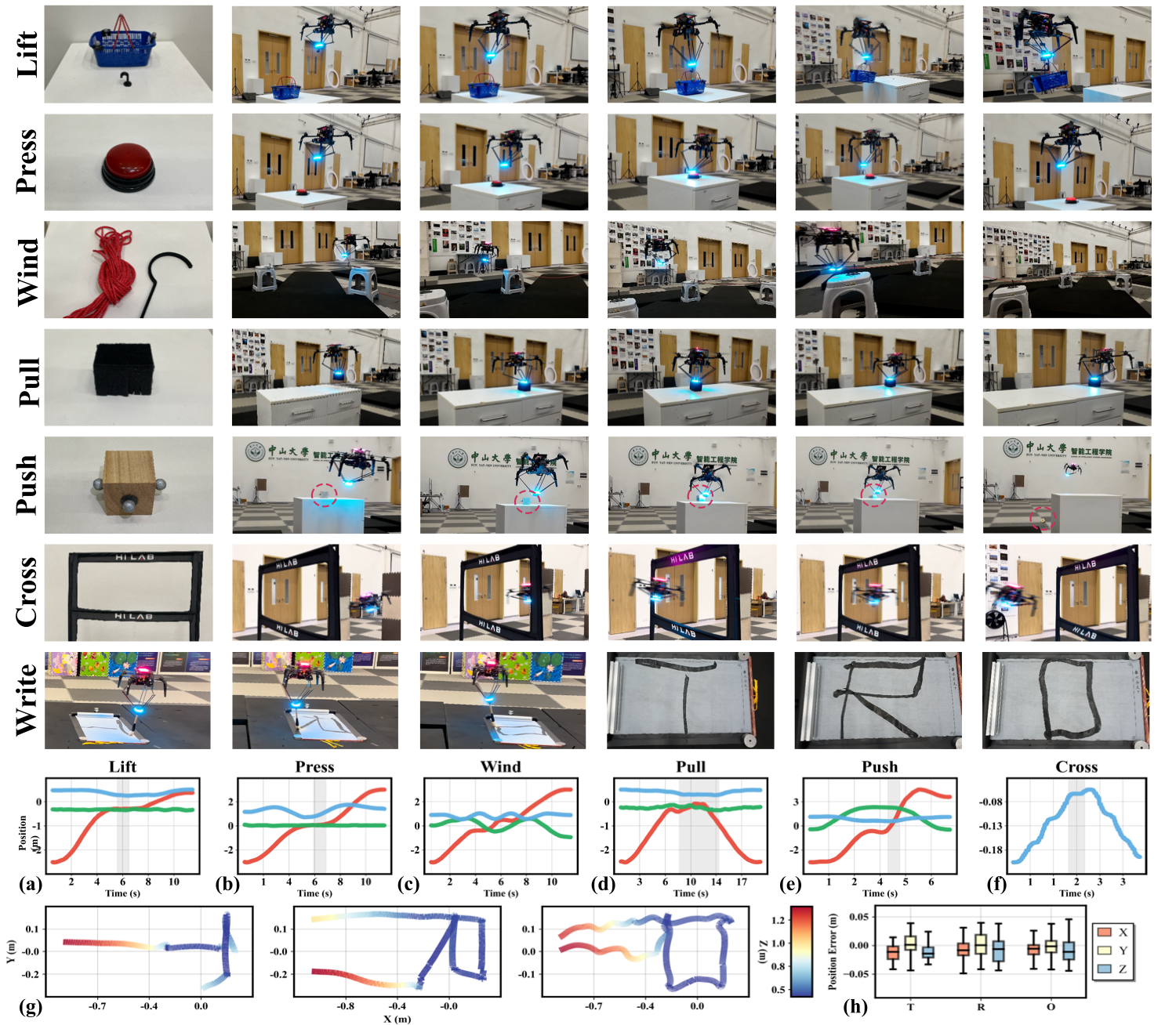
Lift Task
Press Task
Pull Task
Push Task
Wind Task
Write Task
@ARTICLE{deng2025whole,
author={Deng, Weiliang and Chen, Hongming and Ye, Biyu and Chen, Haoran and Li, Ziliang and Lyu, Ximin},
journal={IEEE Transactions on Robotics},
title={Whole-Body Integrated Motion Planning for Aerial Manipulators},
year={2025},
volume={41},
number={},
pages={6661-6679},
keywords={Trajectory;Optimization;Planning;Quadrotors;Manipulator dynamics;End effectors;Grasping;Robot kinematics;Imitation learning;Vectors;Aerial manipulator (AM);collision avoidance;delta arm;motion planning;waypoint constraint},
doi={10.1109/TRO.2025.3626619}
}
@INPROCEEDINGS{chen2025aerial,
author={Chen, Haoran and Deng, Weiliang and Ye, Biyu and Xiong, Yifan and Pan, Zongliang and Lyu, Ximin},
booktitle={2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
title={Aerial Grasping via Maximizing Delta-Arm Workspace Utilization},
year={2025},
volume={},
number={},
pages={12216-12223},
keywords={Kinematics;Grasping;Manipulators;Stability analysis;Real-time systems;Trajectory;Planning;Optimization;Residual neural networks;Quadrotors},
doi={10.1109/IROS60139.2025.11247296}
}